

The goal of this project is to develop new methods, algorithms and simulation tools for paint and surface treatment processes in automotive paint shops. The project is part of Vinnova’s FFI program towards sustainable production technology and our research partners are Volvo Car Corporation, Saab Automobile AB, Scania AB, Volvo AB, Konga Bruk AB, Swerea IVF and General Motors North America.


Sealing material is applied to automotive bodies to cover cavities and seams, where moisture might otherwise create a corrosive environment, and also to dampen noise. In the order of 50 meters of material is used for a car. This is a complex multiphase flow application and the material flow in air and on the target must be considered if the process is to be simulated. The sealing material is a non-Newtonian fluid which is strongly shear thinning such that the viscosity depends on the shear rate. A Carreau fluid can be used to model the rheology of the material, where the parameters are determined from rotational rheometer experiments.
There are different types of nozzles used to apply the material. Here we consider the hollow-cone, in which a curtain of sealing material is sprayed on the target, and the flat bead nozzle. To verify the simulations the resulting width, thickness and shape of applied material on test plates as a function of time and spraying distance have been compared to experiments. The agreement is in general very good. Sealing material application on several more complex geometries have also been successfully simulated. The efficient implementation makes it possible
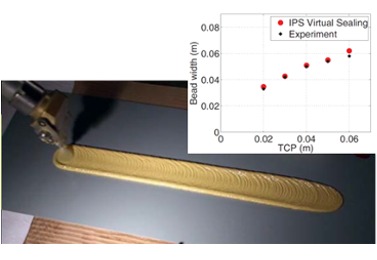
to simulate application of one meter of sealing material in less than an hour on a standard computer, and it is therefore feasible to include such detailed simulations in the production preparation process and off-line programming of the sealing robots.
To achieve this break-through in simulation speed compared to earlier approaches the FCC software IPS IBOFlow has been used.
The IPS Virtual Paint – Sealing software is commercially available and distributed by IPS IBOFlow AB. In the IPS Robot Optimization module collision free curve following algorithms are used to automatically generate the robot paths. The automatic robot path planning includes, (i) task planning to find promising configurations and motions that can follow each sealing curve, (ii) sequence optimization and motion planning to select one solution for each seam and connect them by efficient motions and in a sequence minimizing the cycle time.