
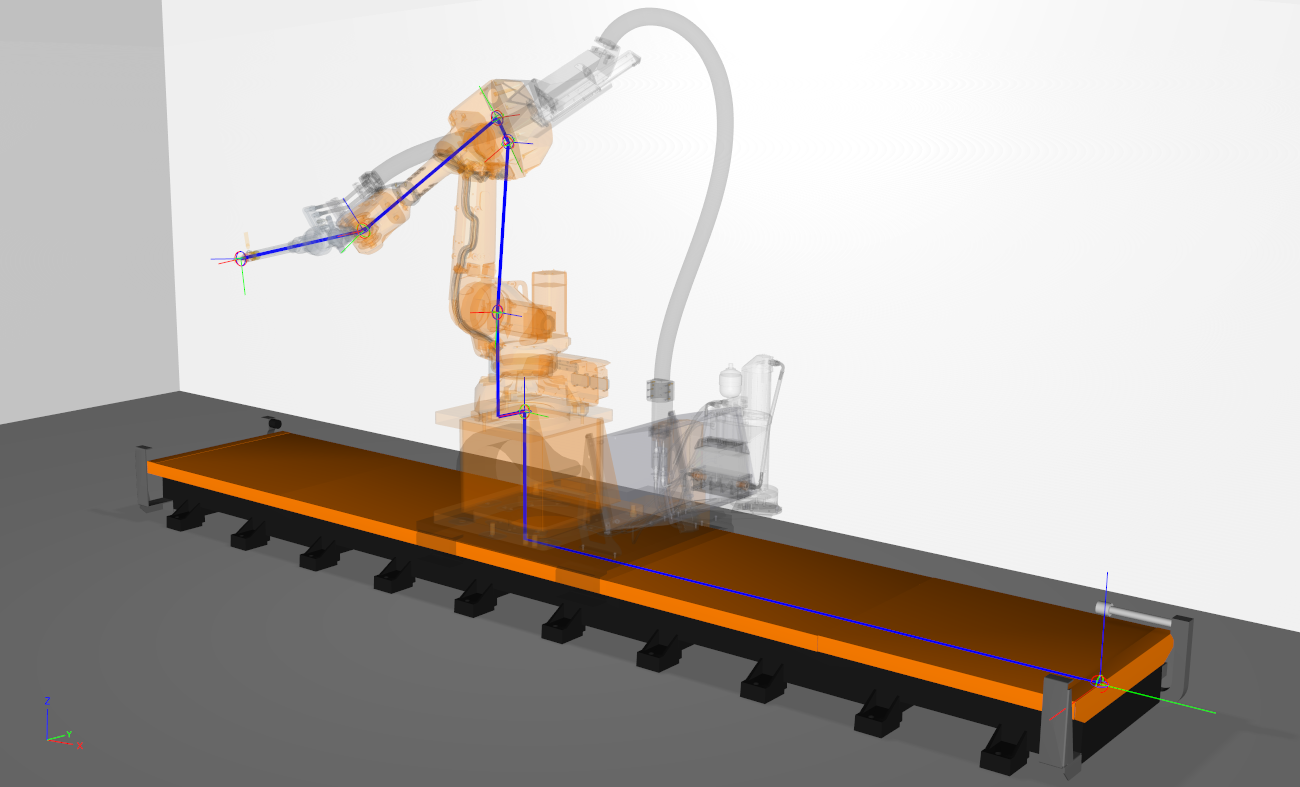
Kinematics is one of the most fundamental mathematical tools used in moving mechanism applications. All moving parts in a simulation have some underlying kinematics defining how the parts move relative to some coordinate system. In robotics, kinematic chains are built up to describe the relative movements of the different robot links connected to each other. At FCC we have built up significant capabilities for handling robot kinematics via numerous industry and research projects.
Details
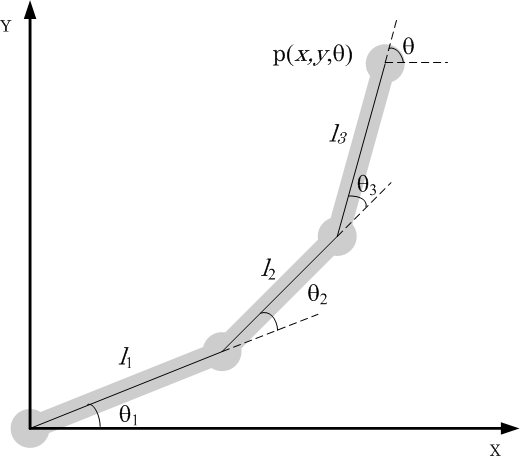
In robot kinematics there are two main classes of problems. The first problem of finding the position of, for example, a robot’s Tool Center Point given all its joint values is called the Forward Kinematics problem. The inverted problem, to find different combinations of joint values, is called the Inverse Kinematic problem. At FCC we have developed fast and efficient algorithms for solving both Forward and Inverse Kinematics for robot geometric configurations, and we possess the knowledge to solve kinematics for all sorts of complex mechanisms.
Application Areas
As kinematics is such a fundamental part of mechanism motions, the application areas are many. Kinematic calculations take place every time an object is positioned, like for example when a robot is moved, when a human manikin is instructed to grip an object or when the boundary conditions of a cable are changed. With our fast kinematic algorithms we can simulate a broad variety of geometric motions in real-time.