
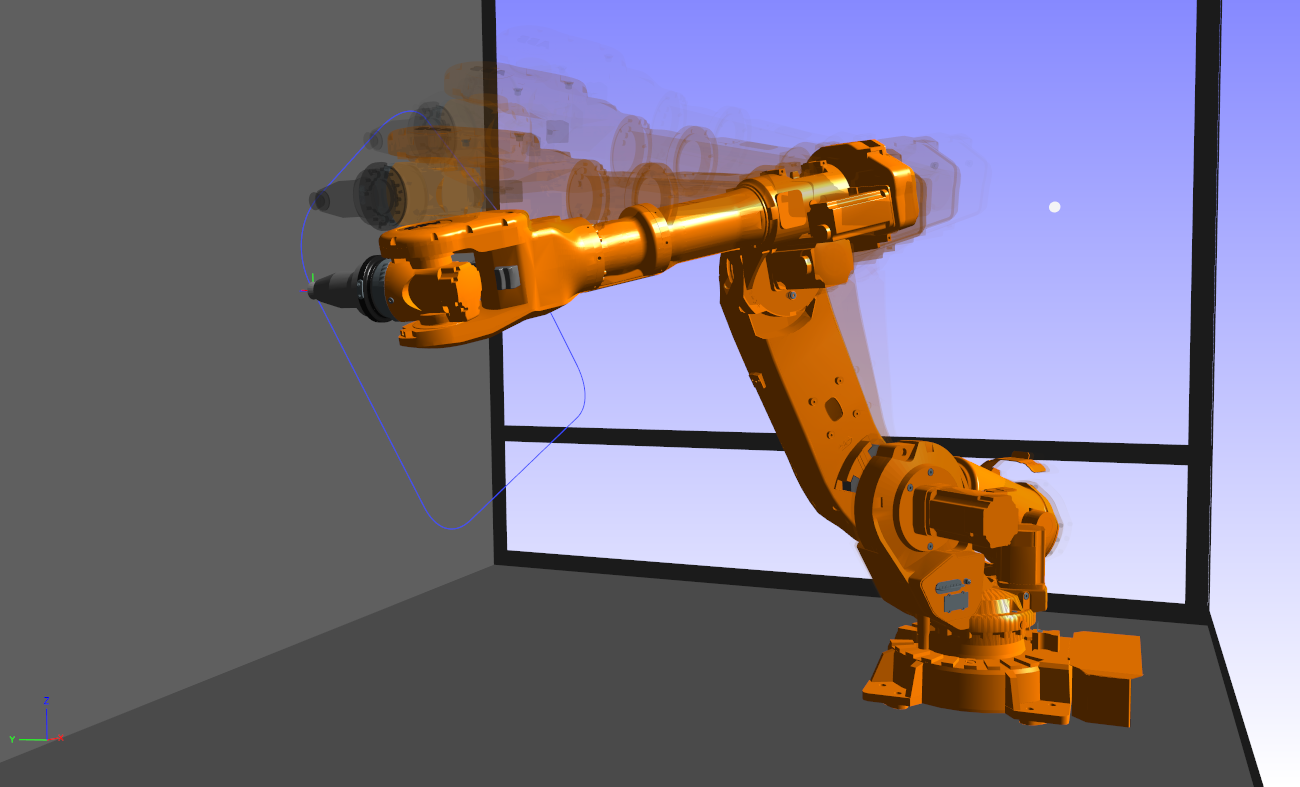
When simulating robots in an offline environment it is of critical importance to have a simulation model that reflects the real world as closely as possible. One key step when it comes to robot simulation is to account for dynamical effects due to the masses and accelerations of the robot links and tool. With an accurate dynamical model of the robot it is possible to perform accurate cycle time estimation and real-time simulation of robot motions. At FCC we have mastered the skills required to quickly compute correct robot dynamics.
Details
The main parameters affecting the dynamical behavior of a robot in motion are the masses of the moving rigid bodies and the torques and forces applied on the robot links. Depending on the momentary position, velocity and acceleration of each robot joint, the applied torques result in varying accelerations. At FCC we have developed our own virtual robot controller to simulate the dynamical effects of a robot in motion.
Application Areas
Dynamical models can be used in many applications, for example robot motion control, kinematic tool modelling and optimal control. One of the main application areas is when simulating robot motions with a virtual robot controller. By controlling the simulated robot with a virtual robot controller, a close-to-reality motion can be achieved.